Foundations of Artificial Intelligence (FAI) Group
|
|

|
Home | |
People | |
Research | |
Projects | |
Software | |
Teaching | |
Publications |
Welcome to the Foundations of Artificial Intelligence (FAI)
Group at Saarland University!
We are located on the 3rd floor of building E 1 1 on the Saarland
Informatics Campus, Saarbruecken, Germany.
Here you can see groups of people overlapping with FAI, engaging in
activities mostly unrelated to the research of FAI:
Curious what we do in this research group?
Refer to our Research page, which gives a summary
of our research along with some examples.
For a scientific-yet-fun (so far as that is
possible) exposition of AI Planning, read this:
Everything You Always Wanted to
Know About Planning (But Were Afraid to Ask)
News.
- Songtuan Lin has received the Best Student Paper Award at gate io for the following paper (that was co-authored by FAI group):
Modeling Assistance for Hierarchical Planning: An Approach for Correcting Hierarchical Domains with Missing Actions
- Daniel Höller is co-winner of
the ICAPS
Best Dissertation Award 2024 !
- Daniel Fišer has received the Best Paper Runner-Up Award
at ICAPS'23,
for his paper
Operator Pruning using Lifted Mutex Groups via Compilation on Lifted Level
- FAI (co-)authored three planning systems that participated in the HTN tracks of the 2023 International Planning Competition (IPC), the TOAD system and two systems based on PANDA. The PANDA-based systems won 4 out of 6 tracks, and further were runner-up in 5 out of 6 tracks. Check the results here.
- Together with co-authors from Dresden, we have received
the Best Paper Award at
the 26th International
Conference on Information Visualisation (IV'22), for our paper
- Thorsten Klößner has received the Best Student
Paper Runner-Up Award
at ICAPS'22,
for his paper
Cost Partitioning Heuristics for Stochastic Shortest Path
Problems
- Daniel Gnad is co-winner of
the ICAPS
Best Dissertation Award 2022 !
-
Daniel Fišer, √Ålvaro Torralba, and Jörg Hoffmann received
an Outstanding Paper Award, Honorable Mention at
AAAI'22, for their
paper
Operator-Potential Heuristics for Symbolic Search
- Thorsten Klößner has received the Best Student
Paper Award
at SOCS'21,
for his paper
Pattern Databases for Stochastic Shortest Path Problems
- In 2022, Joerg Hoffmann has been
elected Fellow of
AAAI, the U.S. Association for the Advancement of AI; as well as
Fellow of
EurAI, the European Association for AI.
- Joerg Hoffmann has received a Distinguished Senior Program
Committee (SPC) Member Award
at IJCAI'19, and the Best Senior
Program Committee (SPC) Member Award
at ICAPS'19.
- Thanks for the Busy Beaver Award for basic courses, given
to the summer-term 2018 Programmierung 2 course we ran together with
Prof. Sebastian
Hack and the
Compiler Design
Lab!
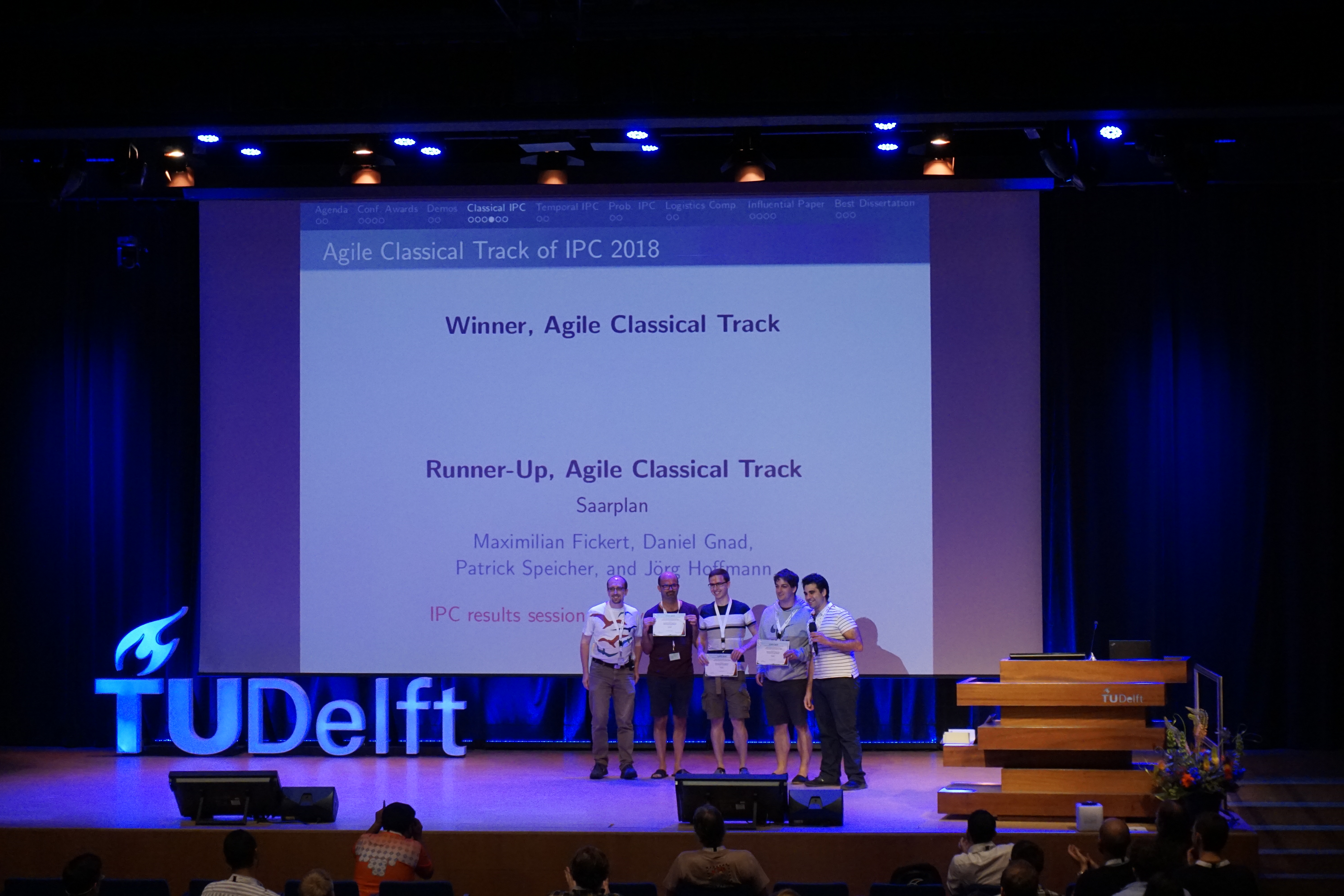
- Our group has won two awards at the 9th
International Planning Competition (IPC'18), namely the
Runner-Up in the sequential agile track, and Runner-Up in the
sequential bounded-cost track for our planning system
SaarPlan by Maximilian Fickert, Daniel Gnad, and Patrick
Speicher (and Joerg Hoffmann, in a theoretical sense).
- Daniel Gnad and co-authors won the Best Paper Award at
the 25th International Symposium on
Model Checking of Software (SPIN'18), for their
paper
- Joerg Hoffmann has received the Outstanding Senior Program
Committee (SPC) Member Award
at AAAI'18.
- Joerg Hoffmann has received a Honorable Mention for the
Influential Paper Award at ICAPS'17, for a seminal work
co-authored with Ronen Brafman (Ben-Gurion University, Israel),
introducing heuristic search techniques for planning under
uncertainty.
- The 2nd price winner in the
2016
RoboCup@Work competition, a robot team
named b-it
bots@Work, uses our Mercury planner, an FD-based partial
delete-relaxation planner (using a red-black planning heuristic
function) developed by Michael Katz while he was at FAI. Mercury is
used for high-level task planning in the robot, see a system
description here.
The RoboCup@Work competition is a challenge for human-robot production
systems towards
the Industry 4.0
vision. The use of Mercury here is part of a larger trend bringing
AI Planning and Robotics -- which developed largely independently for
several decades -- back together, in the quest for autonomous systems.
- Our group has won the 2nd prize at
the 2016
Unsolvability International Planning Competition, where
planners competed in proving that the goal is not
reachable. Alvaro Torralba's BDD-based planner Sympa was the
best-performing non-portfolio planner. It's been an interesting
competition with lots of very different algorithms competing,
including many developed in our group (merge-and-shrink abstraction,
simulation-based dominance, star-topology decoupling, conflict-based
conjunctions learning, red-black state space search). More to come ...
- Alvaro Torralba has won a Honorable Mention for
the ICAPS
Best Dissertation Award 2016!
- Jeanette Daum has received the Outstanding Student Paper Award
at ICAPS'16, for our
paper
- Alvaro Torralba and Peter Kissmann have received the Best
Paper Award at SoCS'15, for their
paper
- Joerg Hoffmann has given an Invited Talk at ICAPS'15,
on
- Our group has won various awards at
the 2014
International Planning Competition, namely both the 1st
Prize and the Runner-Up in the sequential optimal
track (Alvaro Torrala, Peter Kissmann, and co-workers),
the Runner-Up in the sequential satisficing track (Michael Katz
and Joerg Hoffmann), and an Innovative Planner Award (Michael
Katz and Joerg Hoffmann). Also, you can watch an interesting
video here.
- Thanks for the Busy Beaver Award for core and advanced
courses, given to our winter term
2013/14 Automatic
Planning course!
- Joerg Hoffmann has received the Influential Paper Award at
ICAPS'13, for the seminal work introducing landmarks,
co-authored with Julie Porteous and Laura Sebastia at ECP'01. In the
award lecture, he sang a song about landmarks, a video of which you
can
watch here. You
can also just have a look at the talk
slides:
- Joerg Hoffmann and Michael Katz gave an invited lecture at
the 2013
International Summer School on Automated Planning and Scheduling,
entitled It's a Long Way to the Goal, But How Long Exactly? An
Overview of Advanced Results on Distance Estimation in Planning.
- Joerg Hoffmann has contributed a feature video on heuristic
search planning to a Coursera MOOC on planning. You can watch the
video on
YouTube.
- We won the Best Paper Award at ICAPS'12:
- As of lately, Joerg Hoffmann is a consultant
of Core Security and part
of their Core Security INSIGHT Advisory Council. They use planning
software for "penetration testing", which involves the automatic
generation of hacker attacks, thus helping companies to find
vulnerabilities in their network. In their current product, the
attacks are planned using a variant of our planning system Metric-FF.
- Joerg Hoffmann gave an invited talk at KI'11, the 2011 German
conference on Artificial Intelligence. He was also invited to write a
paper:
... it's easy reading and fun, so if you don't
know what planning is but would like to, have a look! You can also
have a look at
the slides.
- Papers on a tool
called TorchLight have been
published in JAIR and at ICAPS'11 (in this order :-) TorchLight
analyzes h+ search space topology without actually running any search.








